障害物を自動で回避するロボットアームを3Dプリンター活用し製造-TRUST SMITH
東大初のAIベンチャーTRUST SMITH株式会社は、障害物回避ロボットアームの設計・開発・製造事業を推進するために、独立行政法人中小企業基盤整備機構による「ものづくり・商業・サービス生産性向上促進補助金(一般型・グローバル展開型)」に採択を受け、開発を推進することを明らかにした。
目次
製造現場で高まるロボットや自動化への期待の背景
製造現場において、労働人口の減少や作業者の老齢化などは無視できない現実だ。外国人労働者の受け入れや、工場派遣などを活用し、しのいでいるとはいえ、今後も労働力確保が難しい傾向は解消されないだろう。そのため、工程の自動化やロボットによる作業者の補助や作業者との共存への取り組みは、大なり小なり取り組んでいかなければならないテーマとして意識されているだろう。
しかしロボットの導入は一筋縄ではいかない。産業用のロボットの代表であるロボットアームはすでに日本の製造業の中でも多く取り入れられているが、ロボットの動作をプログラムする工数は非常に大きく、初期導入時ならびに運用時の工程組み換えを行う際の大きな負担になっている。
ロボットに実行してほしい動作を教え込むプロセスはティーチングと呼ばれる。専門的なプログラムに関する知識を必要とし、だれでも手軽にできるものではないため、通常ロボットSi’erと呼ばれる専門業者に作業を依頼する場合が多い。
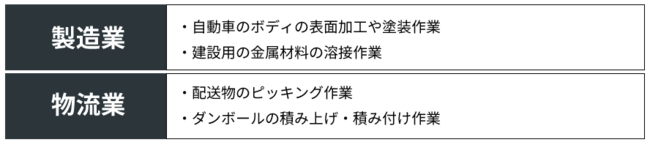
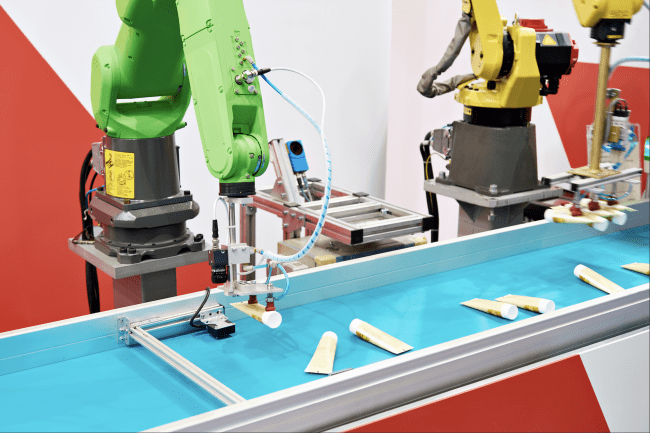
たとえば多品種少量製造時のマテハンにロボットを活用しようとする場合、把持する対象部品の形状や重さ、硬さ・柔らかさに応じた最適なつかみ方はそれぞれ異なるため、個別にティーチングなどの方法で、プログラム化しなくてはならない。工程の組み換えや製品仕様の変更があるたびに、厳密にプログラムを組みなおし、調整を行っていく必要があるため、作業者が人の手で行うような柔軟さは期待できないのが現状だ。
製造現場での工夫はノウハウのかたまり―3Dプリンターによるロボットハンドの造形から
アームに取り付けるハンド部分は既製品も多種展開されているものの、部品をつかむのか、カメラやセンサーを取り付けるのか、溶接装置や塗装装置をつなげるかなど選択肢が多いため、独自に開発される場合も多い。都度、工程ごとに作りこまれる装置という位置づけだったといえる。
そのため多品種少量生産のように、類似の工程でも、流れてくる部品が異なる場合、再度ティーチングやハンドの入れ替えを行う必要が出てくるし、ティーチングだけでは最適化が難しい場合は、既製品のロボットハンドではなく、その工程専用のハンドを設計し、3Dプリンターで造形することも多い。(ハンドの先にアタッチできるツメを付与することで、作り直しを避け、コストを軽減する工夫なども行われている)。
こうした工夫は製造現場のノウハウのかたまりであるため、日々改善していきたいところだろう。本来は社内で内製できる方が望ましいが、内製化できる人材がいない場合、ロボットSl’erに都度有償で依頼を行う必要がある。
障害物回避型ロボットアームとは
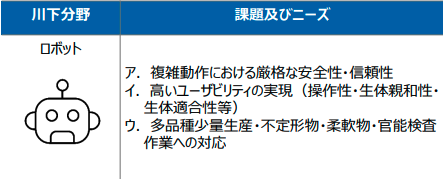
そこで重要になるのは、ロボットアームをより安価に導入し、より簡単に運用できるロボットアームの大衆化だろう。TRUST SMITH株式会社はロボットアームのセンサーによる障害物検知とAIによる回避動作の実行、作業動作をプログラムする「ティーチング」プロセスの大幅な簡易化を通じて、多品種少量生産や柔軟物への対応をより簡単で、柔軟に対応できるようにする取り組みを行うという。
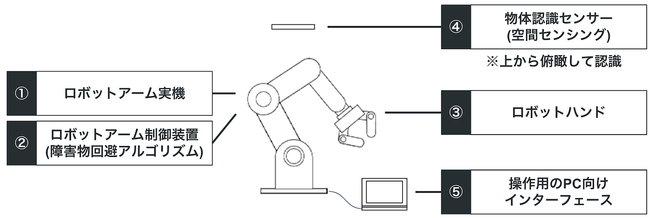
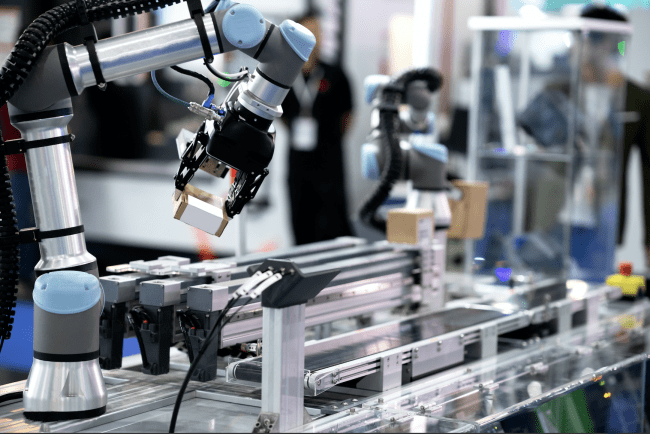
ここでいう「障害物回避型ロボットアーム」は、センサーで障害物を自動で検知し、衝突を回避しながら目的物まで到達するアーム型ロボットのことを指す。最先端の3次元オブジェクト認識の技術を用いて目的物を分別し、ピックアップ作業までを一貫して行うことが出来る。(名前はADAM SMITHという。)
同じ製造現場で作業している作業者や、ほかのロボットアームやAGVなどを認識し、自動的に回避しながら作業を行う能力を持ったロボットアームである。同社のウェブサイトでは、ボルト、六角ナット、ワッシャーなどの形状が異なる部品を種類別に分別する作業工程で導入され、自動化を実現した事例があると紹介されている。同じ作業現場で人間やAGVなどのロボットにとっての動く障害物を自動で検知し回避しながら作業を行えるため、協働というアプローチでも成果を上げているようだ。
製造現場の自動化に大きな期待
TRUST SMITHは「障害物回避型ロボットアームの設計・開発・製造」をはじめめ、今後もさまざまなAI・ロボティクスによる社会の諸問題の解決を目指しており、すでに障害物回避型アームのアルゴリズムでは特許を取得。このほか異常停止後の原点回帰の経路を自動算出するアルゴリズムを開発している。また、製造現場の構内で運用するAGVに関しても制御を自動化する取り組みをはじめ、製造現場の自動化に取り組む自動化ソリューションに取り組んでいるとのことだ。
自動化はニーズが高いが、製造現場で行われている作業の内容が現場によって異なる固有のノウハウの塊でもある。一筋縄ではいかないテーマなのでTRUST SMITHのような取り組みには大きな期待がかかるところだ。

2019年のシェアラボニュース創刊以来、国内AM関係者200名以上にインタビューを実施。3Dプリンティング技術と共に日本の製造業が変わる瞬間をお伝えしていきます。