Fraunhofer IPA は ARBURG社の 3Dプリンター “Freeformer” を活用し、形状自由度が高いセンサーを効率的に生産する手法を提示した。(写真は Fraunhofer IPA が試作した誘導型近接センサー/出典:Fraunhofer IPA)
目次
3Dプリントセンサーの意義
3Dプリンターでセンサーを作製する意義は「構造の自由度」にある。
工場内でセンサーを取り付ける場所は地面や壁などの平面だけではない。可動式ロボットアームなど、取り付けられるセンサーのサイズや形状が限定される場合も多い。
ロボットアームの形状に合わせて逐一センサーを発注していては急な仕様変更に対応できず、コストもかさむ。センサーの形状を自由に変更できる3Dプリンターなら柔軟な仕様変更が可能である。
また、センサーを作るために必要な工程数を減らすことで、将来的には人の手が介在する従来の製造方法より、安価にセンサーを作ることもできるだろう。
Fraunhofer Institute for Manufacturing Engineering and Automation(IPA)はこうした背景を鑑み、3Dプリンターによってセンサーを製造する方法の開拓に乗り出した。
Freeformer 3D printer
3Dプリンターを用いたセンサー製造事業にあたって、Fraunhofer IPA がパートナーとして選んだのが ARBURG である。
同社が製造・販売する 3Dプリンター “Freeformer” は種々のプラスチックペレットをフィラメントとして加工できるため、材料選択の幅が広い。
ポリブチレンテレフタラート(PBT)は、絶縁性や耐久性を生かして電子部品に用いられることが多いが、これまで3Dプリント用材料としては使用できなかった。それに対して、Freeformer は PBT を3Dプリント材料として用いることができる。これが Freefoemer が選ばれた理由である。
誘導型近接センサーの試作
Fraunhofer IPA が対象としたのは、誘導型近接センサーである。
誘導型近接センサーは、高周波磁界を絶えず作り出し、周囲で導体が移動したことを電磁誘導によって検知する。一例として、工業用自動走行ロボットに用いられる。
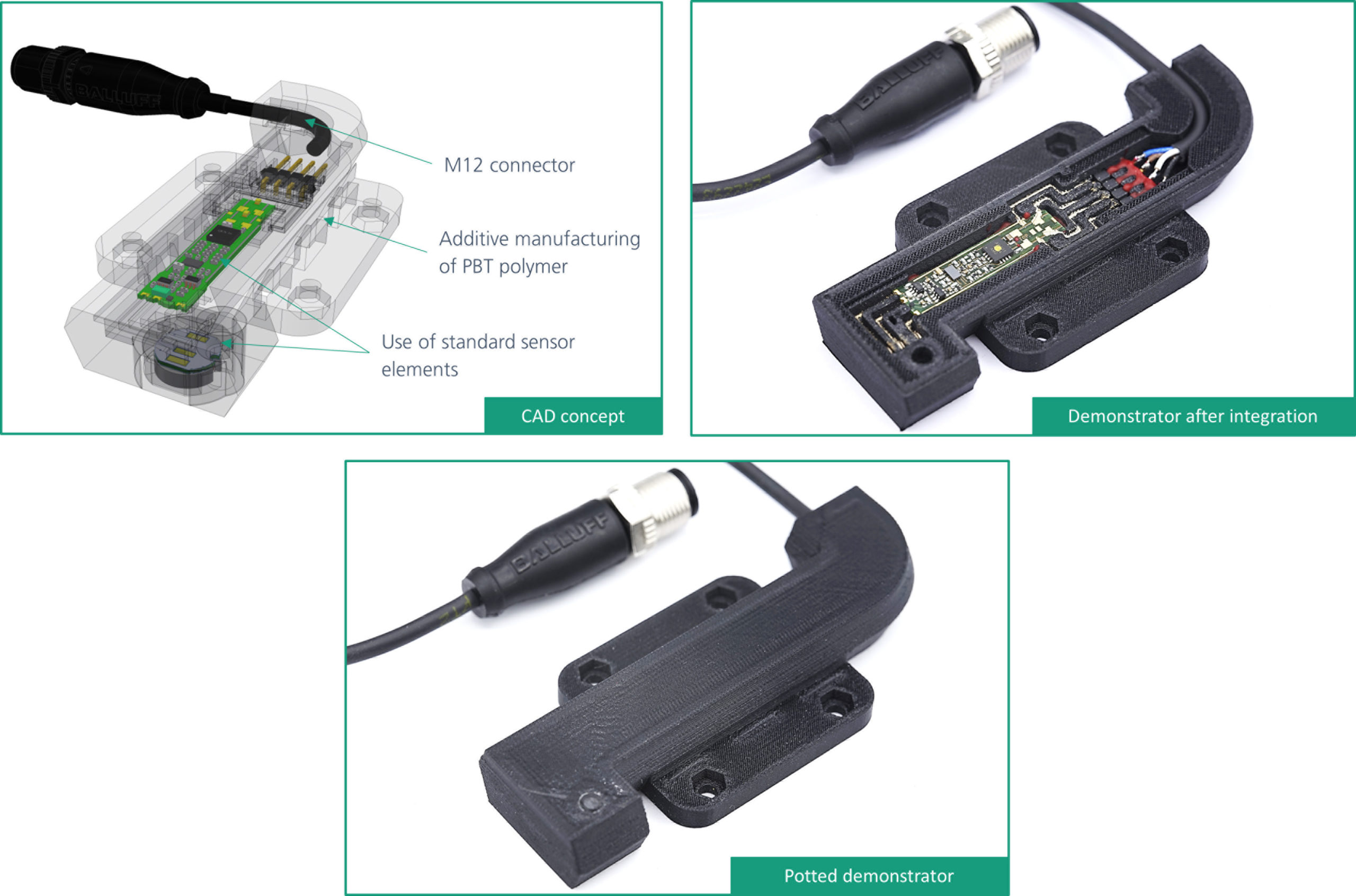
以下に示すのは、Fraunhofer IPA が試作した誘導型近接センサーである。

作製工程は以下の通り。
- Freeformer で PBT製センサーケース下半分を作製
- コイル、回路基板、及び配線ケーブルを正確に配置
- ディスペンサー(※1)で銀インクを滴下、配線を繋ぐ
- Freeformer でセンサーケースの上半分を作製
- ポリウレタンでポッティング(※2)
これらすべてを連続的に、自動で行えるようプログラムした。自動化に際しては、センサーおよび自動化のスペシャリストである BalluffGmbH のサポートを受けた。
研究チームは、上記写真のような形状だけでなく、30以上の異なる形状の試作モデルを作製した。加えて、温度変化と振動に耐えることができ、防水性や電気絶縁性テストに耐えうることも示した。
本研究は、ドイツで進められる「インダストリー 4.0」や「ファクトリーオートメーション」のための施策であることが伺える。将来的には、工場の効率運用に必要なセンサーを AI が判断し、一切人の手を介さずに、センサーが製造・配置される自動化工場が作られるかもしれない。
(※1)ディスペンサー:液体定量吐出装置
(※2)ポッティング:ホコリ・水の侵入防止、耐振化処理。ポリウレタンを塗布し、回路基板を覆うこと。