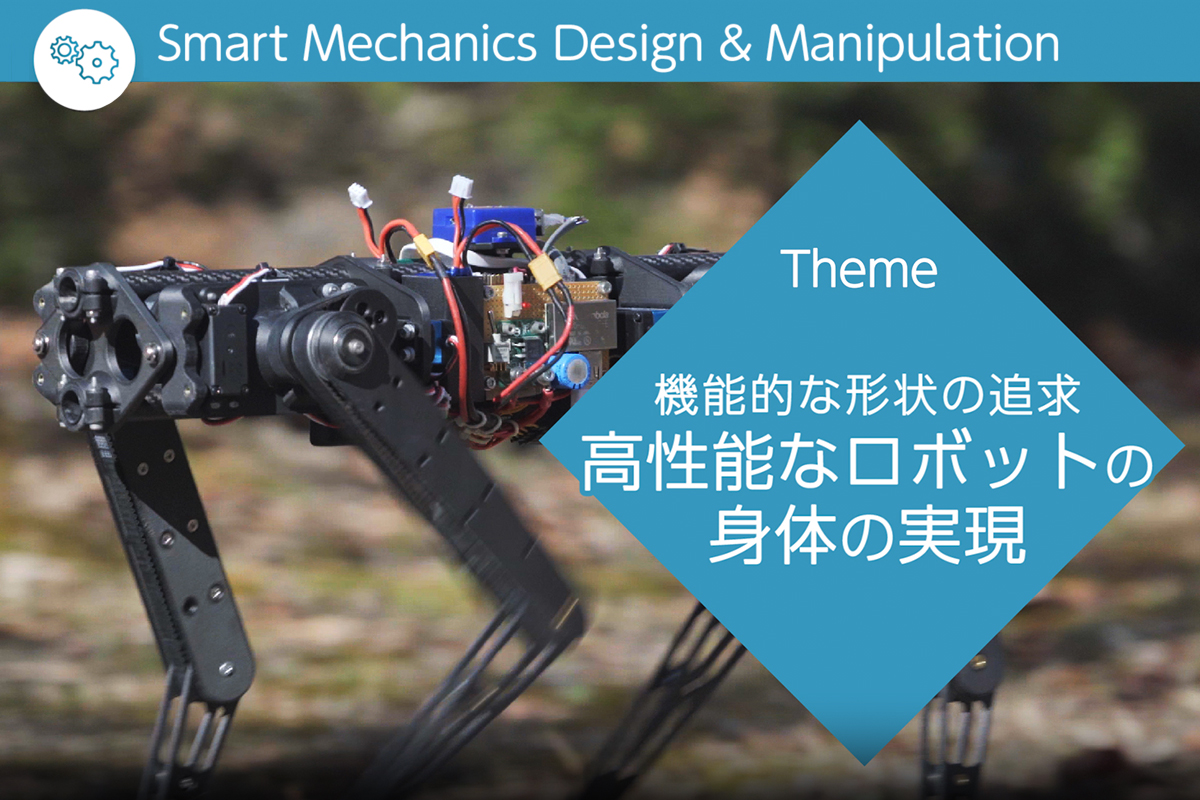
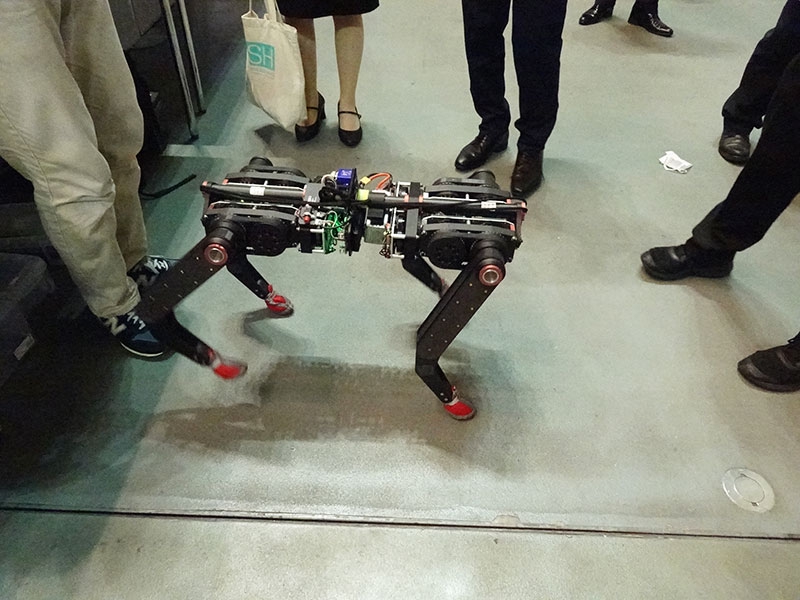
広島大学大学院の先進理工系科学研究科教授の高木 健 氏らが、機構部品を3Dプリンターで製作した4脚ロボットを開発した。機体は胴体の長さが64センチメートルで脚の長さは約50㎝で重量は10㎏強。階段や段差を走破しやすい4脚のメリットを活かし、施設の自動巡回展開機として提案していくとしている。(上部画像は機構部品を3Dプリンターで製作した4脚ロボット。出典:広島大学)
目次
FDM方式の3Dプリンターを活用
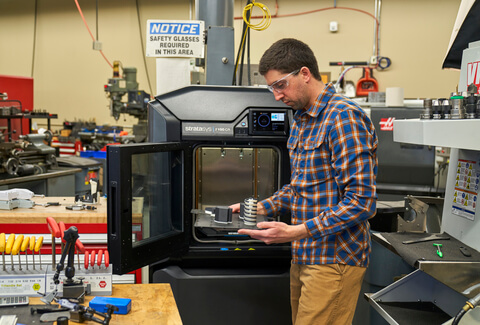
4脚ロボットの開発には、FDM(FFF)方式の3Dプリンターが活用された。FDM方式とは、熱で溶かしたフィラメント樹脂を積層して造形していくもののことをいう。FDM方式について詳しく知りたい方は、「材料押出法 / MEX(Material Extrusion) | 3Dプリンターの造形方式」の記事をご参照いただきたい。
3Dプリンターは3Dデータがあれば金型がなくても用意に迅速に造形ができる点に特徴がある。4脚ロボットは、脚や減速機といったほとんどの部品を3Dプリンターでその都度製造できるので、メンテナンス用の部品在庫数は最小限に抑えられる。
樹脂製備品は強く締め過ぎると歪む特徴がある。今回開発された4脚ロボットでは、その欠点を補うために締結部分に2つのナットを重ねるダブルナット方式が採用されている。ナットを樹脂部品に埋め込むことで、強度も向上した。
3Dプリンター製の部品とネジで構成されるロボットは、破損時の部品交換も容易だ。将来的に複数台のロボットを運用する際にも、1機分の部品を確保しておけば、急な故障に対応できる。在庫がなくなればデータをもとに3Dプリントすればよい。自身でほとんどの部品の製造ができるため、市販品のように供給が止まるリスクも軽減できる。
ロボットメカニズム & マニピュレーション
高木健教授は研究テーマとして「リアルワールドに対する迅速かつ柔軟な行動を実現する基盤ロボティクス技術。高速ビジョンを用いたセンサベースドマニピュレーションの研究。構造に知能を内包したロボットメカニズムの研究などを行っており、人間とは異なる形でのマニピュレーション技術の実現を目指している。」と語る。
今回、開発された4脚ロボットは、設計上は世界最速を目指せるとのこと。走破性能は今後検証される予定だ。
ロボットの関連記事
今回のニュースに関連するものとして、これまでShareLab NEWSが発表してきた記事の中から3つピックアップして紹介する。ぜひあわせてご覧いただきたい。

国内外の3DプリンターおよびAM(アディティブマニュファクチャリング)に関するニュースや最新事例などの情報発信を行っている日本最大級のバーティカルメディアの編集部。