センサーも電子回路も搭載せず、それでいて周囲環境に応じて動きを変える——そんな「生物のような振る舞い」を示すマイクロロボットが登場した。オランダのライデン大学の研究チームは、3Dプリントによって作製した微細構造が、自律的に泳ぎ、障害物を回避する様子を確認した。従来のロボット設計とは異なる、新しいアプローチとして注目される。
目次
センサーなしで動くマイクロロボット
今回の研究では、わずか数マイクロメートルサイズの柔軟な構造体が開発された。特徴的なのは、センサーや制御プログラムを一切持たない点である。それにもかかわらず、周囲の状況に応じて進路を変えたり、他のロボットと衝突を避けたりする挙動を示す。この振る舞いは、構造そのものに由来する。つまり「形状」と「動き」が相互に影響し合うことで、あたかも意思決定しているかのような動作が生まれている。
二光子重合による超微細造形
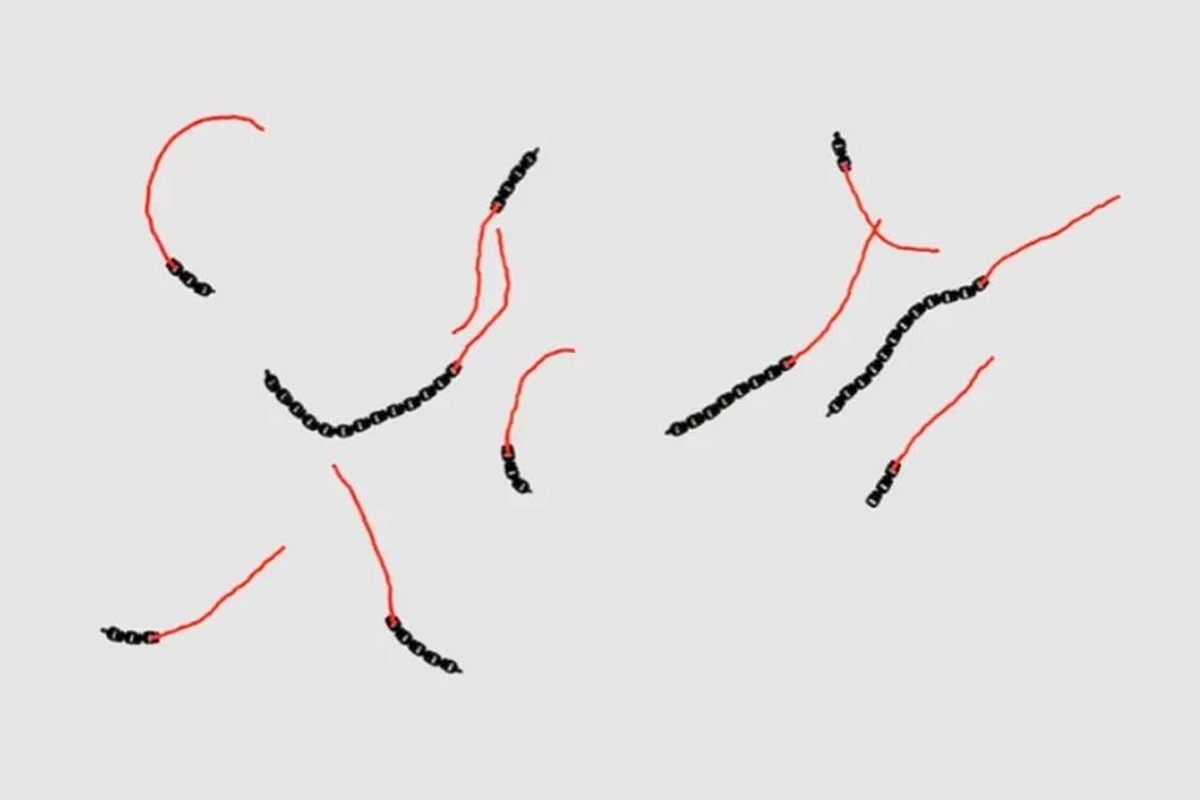
このマイクロロボットは、二光子重合方式の3Dプリンターを用いて製造されている。幅5µmのセグメントを0.5µmのジョイントで連結した鎖状構造であり、そのスケールは人間の髪の毛の約10分の1である。このレベルの微細造形は、現在の3Dプリント技術の限界に近い領域であり、精密な構造設計がそのまま機能に直結する点が特徴だ。
電場で駆動、波のように泳ぐ
ロボットの駆動には、外部から与えられる交流電場が用いられる。電場が印加されると、各セグメントが動き始め、全体として波状の運動が発生する。この動きは微生物の遊泳に近い。重要なのは、特定のプログラムに基づいて動いているのではなく、構造の柔軟性と物理的相互作用によって複数の移動パターンが自然に生まれる点である。
“身体性”による知能的挙動
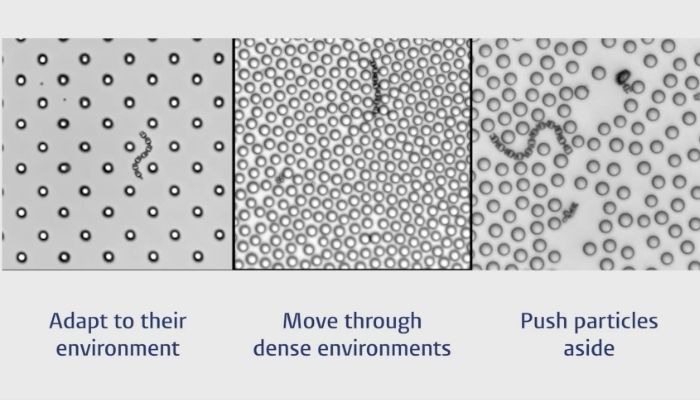
研究チームは、この現象を「身体性に基づく知能(エンボディド・インテリジェンス)」と説明している。ロボットの形状が環境によって変化し、その変化が次の動きに影響するというフィードバックが働くことで、結果として適応的な行動が実現される。例えば、障害物にぶつかると別ルートを探し、密集環境では物体を押しのけて進む。複数のロボットが同時に動作する場合も、互いに干渉しながら衝突を回避する。
医療分野での応用に期待
このようなマイクロロボットは、特にバイオメディカル分野での応用が期待される。体内のような複雑で狭小な環境でも自律的に移動できるため、以下の用途が想定される。
・局所的な薬剤送達
・低侵襲な治療・手術
・新たな診断技術
電子部品を必要としないため、小型化やコスト面でも有利になる可能性がある。
今後の課題は「なぜ動くのか」の理解
今後は、このような挙動がどのように発現するのか、その物理的メカニズムの解明が進められる見込みである。この知見は、より高度なマイクロロボット設計だけでなく、生物の運動原理の理解にもつながる可能性がある。
編集部コメント
従来のロボット開発は「センサー+制御+アクチュエータ」という構成が前提だった。しかし本研究は、その前提を大きく崩すものである。構造と材料、そして物理現象だけで“賢く見える挙動”を実現している点は、設計思想の転換を示唆する。産業用途としてはまだ距離があるものの、医療分野ではブレークスルーになり得る。特に体内環境のようにセンサー設計が難しい領域では、このアプローチの価値は高い。また、3Dプリントの役割も重要だ。単なる形状再現ではなく、「機能そのものを内包した構造」を作り出すツールとしての位置づけが、より明確になりつつある。
用語解説
| ■ 二光子重合(Two-Photon Polymerization) 超短パルスレーザーを用いて樹脂を局所的に硬化させる微細造形技術。ナノ〜マイクロスケールでの高精度な3Dプリントが可能で、微小構造体や医療用途のデバイス製造に利用される。 |
| ■ エンボディド・インテリジェンス(身体性知能) 知能が脳や計算だけでなく、身体構造や環境との相互作用によって生まれるという考え方。ロボットや生物の運動研究で注目されている概念。 |
ロボットの関連記事
今回のニュースに関連するものとして、これまでShareLab NEWSが発表してきた記事の中からピックアップして紹介する。ぜひあわせてご覧いただきたい。

国内外の3DプリンターおよびAM(アディティブマニュファクチャリング)に関するニュースや最新事例などの情報発信を行っている日本最大級のバーティカルメディアの編集部。